antes de nada debemos hacer un croquis con la colocacion aproximada de todos los componentes necesarios para el raton robot.:

1 paso:
abrir el raton y sacarle todo. dejarlo vacio y quitarle todos los soportes de plastico que tenga adentro como el de la imagen:


3ºpaso: A la hora de poner los motores y el interruptor delantero tenemos que mirar el grado donde pondremos los motores, es importante los grados para definir la velocidad del raton. Si los motores no están alineados, el robot se pone a girar en circulos.
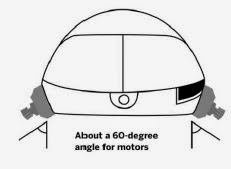

en la imagen de arriba se ve el whisker o bigote donde funcionara
como un interruptor para ir hacia atras cuando se choque y se cierre el
interruptor.
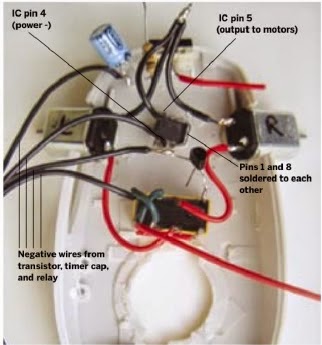
5º Ahora pondríamos los cables o la parte electrónic, nosotros lo pondremos soldado en una plaquita ya que queda mas ordenado y mas protegido ante choques del raton.



Por ultimo sacamos los IR tras unos orificios en la parte de arriba y colocamos todo. Cerramos la tapa y lo tendremos en funcionamiento, y paracido a este:







{kind=link}
{kind=link}
{kind=link}
{kind=link}